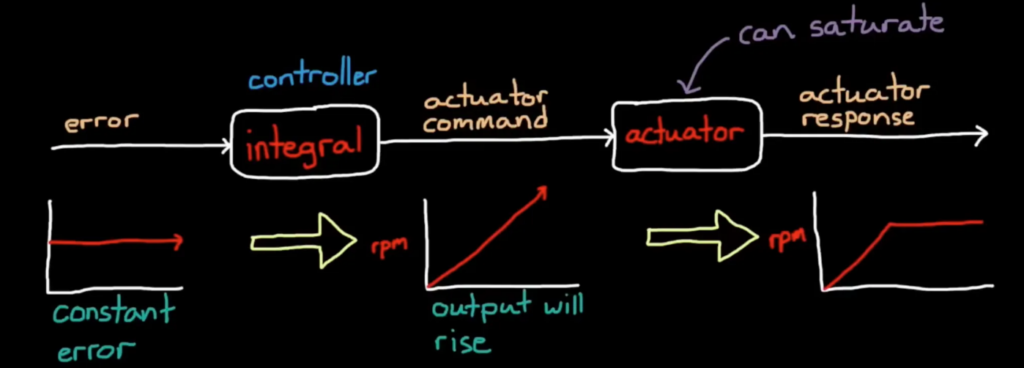
The system that we want to control can be thought as two separate systems. Firstly, the actuators, these are the devices that are generating the forces or energy to change the system like motors or heaters. The second system is the process, it is the thing that the actuator is working against and trying to affect it in some way. (If the actuator is a heater, the process is the object that the heater is heating.)
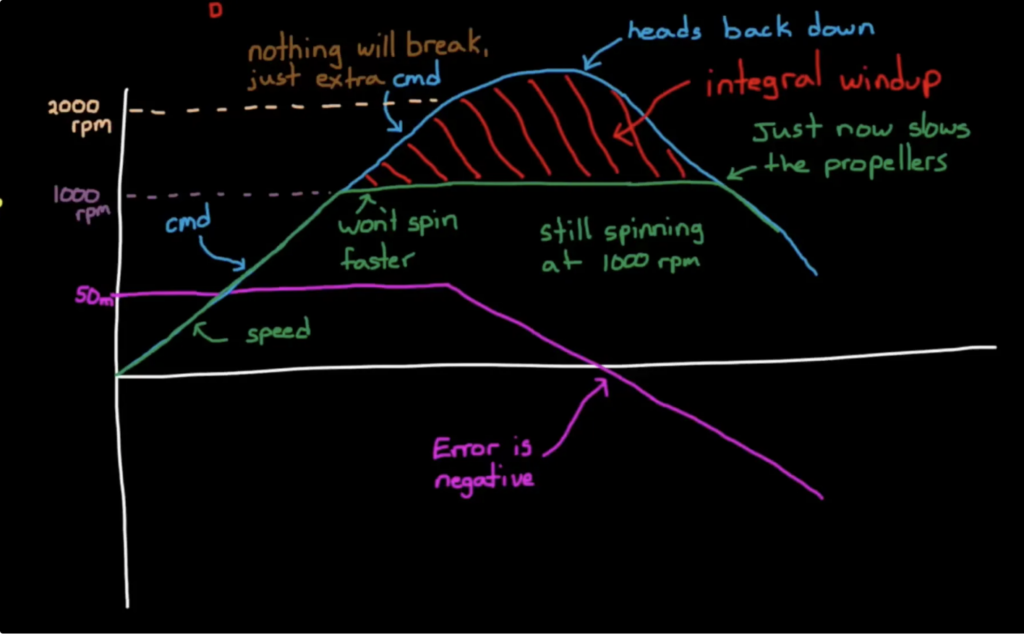
In real life, the actuator is not a linear system, they are not ideal devices. It means that this actuator can saturate, or in other words, this actuator cannot follow every command that it is given. For example, a system is having a continuous non-zero error, when this error goes through the integrator, the output of the integrator will increase at a constant rate without stopping to reduce the error. Lets say if the actuator is an motor, and the output from the integrator is the command. If we command this motor with this ever increasing request, it will follow the command at first and eventually it will reach its maximum rpm (round per minute) and won’t go any faster. This phenomenon is called saturation, when the realistic actuator reaches a mechanical limit and could no longer follow the command given to it.
Integral windup occurs when the integral term of the PID controller accumulates a large error over time, causing the controller output to become excessively large. This typically happens when the system is unable to respond effectively to the error, for example when a actuator reaches its saturation limit. When the actuator reaches it saturation limit and still couldn’t respond effectively to the error, the integral term would just increase steadily without stopping, the problem comes from trying to remove or unwind the excess command from the integral. This is because the system would go over the desired set point having a negative error and actuator would keep working at its saturation limit until this negative error decreases the integral to a point below the saturation limit, the actuator would then slow down.